Cloud-based Open loop optimize SLAM
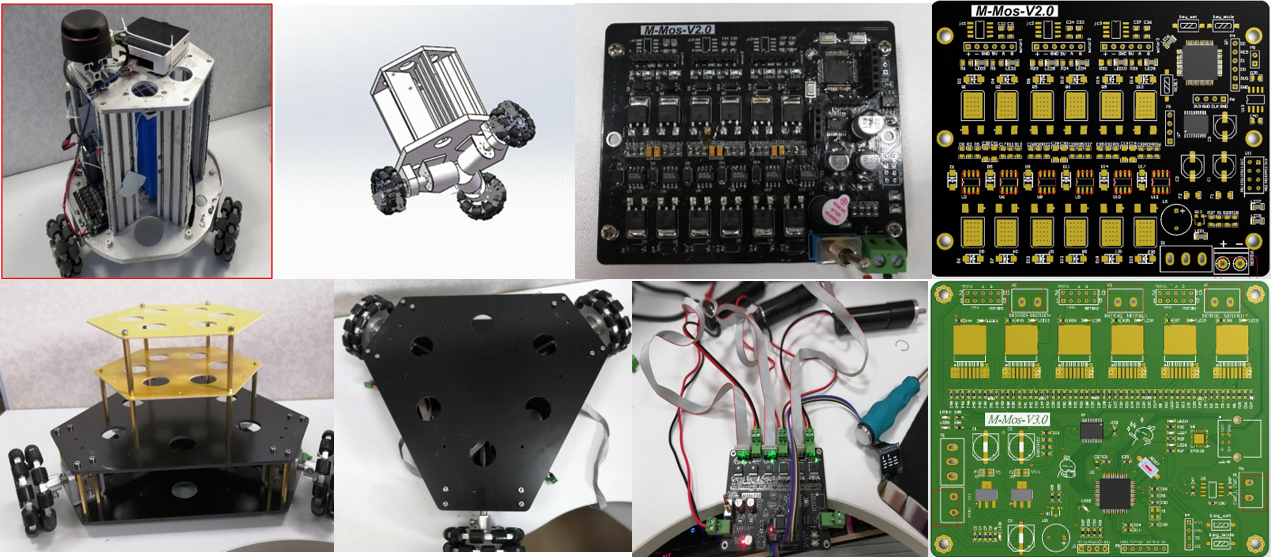
We design the mobile robot by myself, including the machine design, motor driver, and all the communication with miniPC.
Based on Cartographer, we focus on how to build map in gallery with sparse features using 2D laser. Apriltag is used as the position-known landmark to build the constraint and add it to global optimization. The accumulated error is adjusted by the extra constraint in sparse feature gallery and the failure of building map is avoided. Websocket is used to achieve the cloud-based mapping, which the sensor data is captured by the mobile robot and calculation is run in the cloud server.
Bangguo Yu
Postdoctoral Researcher in Robotics
My research interests include embodied artificial intelligence, robotic navigation, and multi-robot systems.