Biography
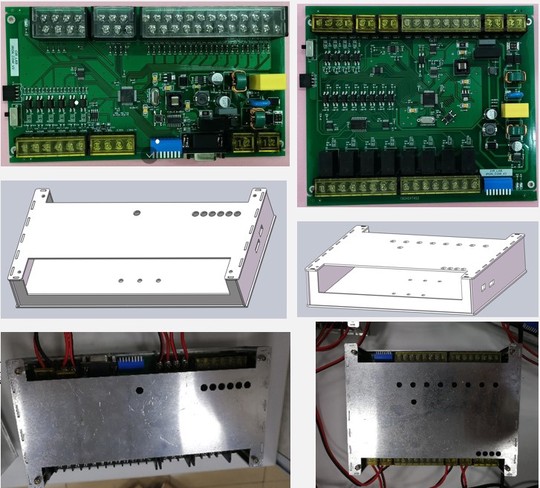
When I stood on the field of ROBOCON competition in 2017’s, behind was the encouragement of teammates and in front of was the hope of victory. At that moment I fell in love with Robotics. As the major of automation student, I feel honor when I processed the part of robot, welded circuit board and debugged the program. Every coherent action of the robot is the most beautiful art in my eyes. And when I was familiar with the bottom-level knowledge of robotics, the high-level task of the robotic in perception and planning was my goal.
These movies “Edge of Tomorrow” and “Next” inspire me with the method of learning for the automatic robot. In my opinion, deep reinforcement learning can help robots achieve the same performance as movies by designing a reasonable reward. Parsing and utilizing effective environmental information of the 3D scene is not trivial due to the complexity of the 3D environment and the limited ability for reasoning about our visual world. Of course, the day has not yet come, and seems to be difficult, but it is because of its uncertainty that it’s worth studying.
Interests
- Robotics
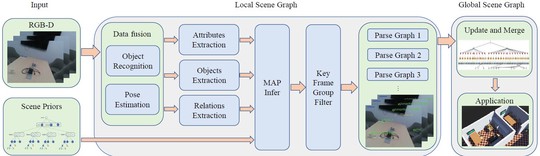
- 3D Scene Graph
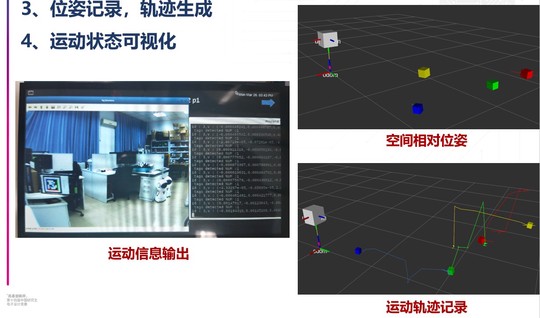
- Target-driven Navigation
Education
PhD in Robotics, 2021.11 - Now
University of Groningen
MEng in Control Engineering, 2018.09 - 2021.6
Shandong University
BSc in Automation, 2014.09 - 2018.06
Shandong University of Science and Technology